PIP在Linux+glibc中的实现
优先级反转
优先级反转指一个高优先级任务因为资源被低优先级任务占用,而不得不等待。这个逻辑本身没有什么问题。优先级反转带来最直接的问题就是高优先级可能因为这次阻塞,而无法确定阻塞时延。如下图所示。
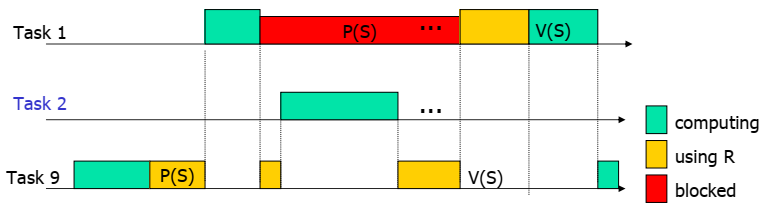
Task 9优先级较低,所以很容易被其他优先级的任务抢占运行,导致对资源S的锁无法释放,而高优先级的任务因为要持有该锁,不得不等待。
优先级继承
Priority Inheritance Protocol翻译为优先级继承,简称PIP。这是解决上述Unbounded inversion最直接的办法,就是将占有锁的线程优先级调整到在等待的任务的最高值。这个算法是贪婪的,局部最优,但不是整体最优解,在此之上又有PCP(优先级天花板)和SRP(基于栈的资源策略)。本文不做讨论。本文主要从源码的角度,阐述PIP在Linux和glibc中的具体实现。
Overview
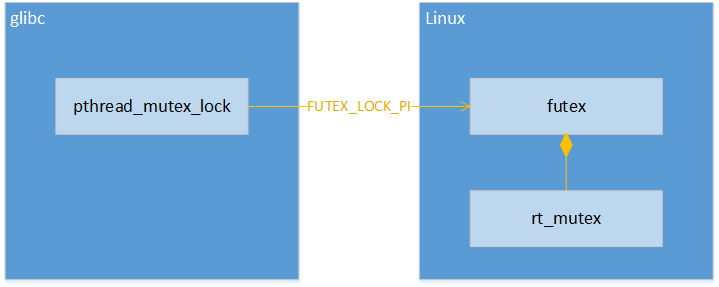
Linux下的PIP实现分成以上3个部分:
- glibc中的pthread_mutex_lock提供用户接口,通过FUTEX_LOCK_PI实现优先级调整
- Linux的futex部分提供FUTEX_LOCK_PI的实现
- 最终的锁机制通过rt_mutex来实现
pthread_mutex
Types
pthread mutex是POSIX pthread库中定义的一种锁机制,与信号量不同的是,这个锁只有两种状态:locked或unlocked。与binary semaphore不同的是,mutex只能被lock的线程unlock,即只能被mutex owner unlock。
目前POSIX标准(1003.1-2008)中定义了4种类型的mutex:
- PTHREAD_MUTEX_NORMAL
- PTHREAD_MUTEX_ERRORCHECK
- PTHREAD_MUTEX_RECURSIVE
- PTHREAD_MUTEX_DEFAULT
这4种mutex不同之处如下
| attempting to relock this mutex without first unlocking | Attempting to unlock a mutex locked by a different thread | |
|---|---|---|
| NORMAL | deadlock | undefined |
| ERRORCHECK | return error -EDEADLOCK | return error |
| RECURSIVE | succeed in locking | return error |
| DEFAULT | undefined | undefined |
glibc对上述4种类型的mutex进行了扩展,例如:
case PTHREAD_MUTEX_PI_RECURSIVE_NP:
case PTHREAD_MUTEX_PI_ERRORCHECK_NP:
case PTHREAD_MUTEX_PI_NORMAL_NP:
case PTHREAD_MUTEX_PI_ADAPTIVE_NP:
case PTHREAD_MUTEX_PI_ROBUST_RECURSIVE_NP:
case PTHREAD_MUTEX_PI_ROBUST_ERRORCHECK_NP:
case PTHREAD_MUTEX_PI_ROBUST_NORMAL_NP:
case PTHREAD_MUTEX_PI_ROBUST_ADAPTIVE_NP:
主要多了这3种属性:
-
ADAPTIVE:在SMP架构下,并不直接进入wait,而是先调用spinlock等待一小段时间。musl里默认都采用了这种实现
-
PI:包含该属性的mutex,实现了优先级继承(Priority Inheritance, PI)
-
ROBUST:若线程退出时未释放锁,则以后对该锁操作都会返回-EOWNERDEAD,与之对应的是PTHREAD_MUTEX_STALLED(这是默认配置),对该异常锁的操作会出现undefined行为。
再与原先的4种属性进行排列组合。
"_NP" suffix
Note: the _NP suffix indicates a non-portable extension to the POSIX specification. In fact the latest specification, 1003.1-2008 [2], includes most of the Linux additions so you can leave the _NP ending off. I have chosen not to because some older versions of the header files only have the _NP variants.
根据最新的POSIX标准1003.1-2008,这些扩展并没有加入。
本文只关注MUTEX_PI实现。
PTHREAD_MUTEX_PI
pthread_mutex_lock
重要数据结构如下:
typedef union
{
struct __pthread_mutex_s __data;
char __size[__SIZEOF_PTHREAD_MUTEX_T];
long int __align;
} pthread_mutex_t;
struct __pthread_mutex_s
{
int __lock __LOCK_ALIGNMENT;
unsigned int __count;
int __owner;
...
}
如果不考虑ROBUST情况的处理,一次针对实现了PI属性的pthread_mutex_lock操作如下:

atomic_compare_and_exchange_val_acq
这是一种原子操作,先比较再赋值,伪代码如下:
int compare_and_swap(int* reg, int oldval, int newval) { ATOMIC(); int old_reg_val = *reg; if (old_reg_val == oldval) *reg = newval; END_ATOMIC(); return old_reg_val; }针对代码中的具体情况:
oldval == 0: 表示mutex->__data.__lock == 0,即该lock无owner,可以获得。oldval != 0: 表示该mutex被lock了,从而进入kernel来处理锁的情况。
pthread_mutex_lock的逻辑比较简单,就是通过一个原子操作判断锁是否已经被锁住。如果没锁住就更新owner,以及user计数。如果已经被锁住,则陷入内核调用FUTEX_LOCK_PI系统调用完成上锁的操作。
pthread_mutex_unlock
这个接口基本上就是直接调用futex_unlock_pi SYSCALL来完成工作:
/* Unlock the mutex using a CAS unless there are futex waiters or our
› TID is not the value of __lock anymore, in which case we let the
› kernel take care of the situation. Use release MO in the CAS to
› synchronize with acquire MO in lock acquisitions. */
int l = atomic_load_relaxed (&mutex->__data.__lock);
do
› {
› if (((l & FUTEX_WAITERS) != 0)
› || (l != THREAD_GETMEM (THREAD_SELF, tid)))
› {
› INTERNAL_SYSCALL_DECL (__err);
› INTERNAL_SYSCALL (futex, __err, 2, &mutex->__data.__lock,
› › › › __lll_private_flag (FUTEX_UNLOCK_PI, private));
› break;
› }
› }
while (!atomic_compare_exchange_weak_release (&mutex->__data.__lock,
› › › › › › &l, 0));
futex
futex是一种内核的等待机制,等待某个用户态数据被设置成某个值。针对优先级继承的futex略有不同。它不再等待用户传入的地址上的值,而是基于内核rt_mutex机制实现等待,上锁和解锁的功能。看下面glibc和Linux的接口对接:
// glibc: pthread_mutex_lock.c
int e = INTERNAL_SYSCALL (futex, __err, 4, &mutex->__data.__lock,
› › __lll_private_flag (FUTEX_LOCK_PI,
› › › › › private), 1, 0);
// Linux: futex.c
long do_futex(u32 __user *uaddr, int op, u32 val, ktime_t *timeout,
› › u32 __user *uaddr2, u32 val2, u32 val3)
{
...
case FUTEX_LOCK_PI:
› return futex_lock_pi(uaddr, flags, NULL, 1);
...
}
可见:
uaddr = &mutex->__data.__lockflags = __lll_private_flag (FUTEX_LOCK_PI, private)val = 1, timeout = NULL
关于lock/unlock的叙述会简化掉time相关部分,以及PI无关的ROBUST等特性。
重要数据结构
/*
* Hash buckets are shared by all the futex_keys that hash to the same
* location. Each key may have multiple futex_q structures, one for each task
* waiting on a futex.
*/
struct futex_hash_bucket {
› atomic_t waiters;
› spinlock_t lock;
› struct plist_head chain;
} ____cacheline_aligned_in_smp;
/**
* struct futex_q - The hashed futex queue entry, one per waiting task
* @list:› › priority-sorted list of tasks waiting on this futex
* @task:› › the task waiting on the futex
* @lock_ptr:› › the hash bucket lock
* @key:› › the key the futex is hashed on
* @pi_state:› › optional priority inheritance state
* @rt_waiter:› › rt_waiter storage for use with requeue_pi
* @requeue_pi_key:›the requeue_pi target futex key
* @bitset:›› bitset for the optional bitmasked wakeup
*
* We use this hashed waitqueue, instead of a normal wait_queue_entry_t, so
* we can wake only the relevant ones (hashed queues may be shared).
*
* A futex_q has a woken state, just like tasks have TASK_RUNNING.
* It is considered woken when plist_node_empty(&q->list) || q->lock_ptr == 0.
* The order of wakeup is always to make the first condition true, then
* the second.
*
* PI futexes are typically woken before they are removed from the hash list via
* the rt_mutex code. See unqueue_me_pi().
*/
struct futex_q {
› struct plist_node list;
› struct task_struct *task;
› spinlock_t *lock_ptr;
› union futex_key key;
› struct futex_pi_state *pi_state;
› struct rt_mutex_waiter *rt_waiter;
› union futex_key *requeue_pi_key;
› u32 bitset;
} __randomize_layout;
/*
* Priority Inheritance state:
*/
struct futex_pi_state {
› /*
› * list of 'owned' pi_state instances - these have to be
› * cleaned up in do_exit() if the task exits prematurely:
› */
› struct list_head list;
› /*
› * The PI object:
› */
› struct rt_mutex pi_mutex;
› struct task_struct *owner;
› atomic_t refcount;
› union futex_key key;
} __randomize_layout;
futex_hash_bucket对应一个用户态的uaddr。通过用户态传入的uaddr地址,来获得对应的futex结构体。用hash的原因是传入的是uaddr地址值,数字很大,分布很散,所以用hash可以有效索引。
futex_q是一个临时变量,对应了一个futex的waiter线程。它通常被用来传递各种数据结构。
pi_state是task_struct内部的一个变量,在futex_lock_pi调用refill_pi_state_cache里面做分配。
static int refill_pi_state_cache(void)
{
...
pi_state = kzalloc(sizeof(*pi_state), GFP_KERNEL);
current->pi_state_cache = pi_state;
...
}
futex_lock_pi
这个函数的逻辑还是比较直线的,同大多数锁的实现一样,先尝试原子锁,如果不行,则调用rt_mutex的实现来处理优先级继承的机制。以下捡取比较重要的函数做阐述,也可以参考参考文献[3], [4]中的描述。
queue_lock, queue_unlock
对hash_bucket进行锁操作。他们操作的是hash_bucket下的lock,同时也是futex_q下的lock_ptr。这里锁的出现比较混乱,有时调用上面的这两个函数,有时直接对lock指针操作。需要小心。
__queue_me, unqueue_me
这里将申请futex的线程在hash_bucket的chain上做添加或移除操作。还会涉及锁的操作。
以上4个函数更多的与futex的实现相关,与优先级继承并无关系,所以可以略过。
futex_lock_pi_atomic

这个函数做的就是原子操作来请求锁,
- 如果futex没有waiter,则直接获得锁并返回1,表示成功获得锁
- 如果有waiter,就返回0,表示ready to wait
这个函数不同的是会做一些与PI相关的处理:
- 有waiter的情况:
- 调用attach_to_pi_state来获得该top_waiter的pi_state
- 没有waiter的情况
- 调用attach_to_pi_owner来取用本线程里分配的pi_state结构体,并更新数据。之后,会被queue到hash_bucket的队列中。
rt_mutex接口
futex_lock_pi中使用到如下这些rt_mutex接口:
- rt_mutex_init_waiter:初始化waiter数据结构,其实为一个红黑树的节点。这个waiter对应当前线程,并反映线程在某个锁上的等待关系。
- __rt_mutex_start_proxy_lock:这个是PI的核心函数,用来对各waiters数据进行操作,以及遍历lock链来检查死锁。这个函数与之前的原子检查类似,如果返回1表示已经获得锁,如果返回0,则ready to wait。
- rt_mutex_wait_proxy_lock:通过__rt_mutex_start_proxy_lock处理之后,如果还没有获得锁,那就可以开始等待了,这个函数将线程切换为TASK_INTERRUPTIBLE状态,并开始等待。这其间会处理基于时间的等待,且会触发调度。
- rt_mutex_cleanup_proxy_lock:现在已经阻塞结束了,如果还没获得锁,要么是超时,要么是出错,总之要将本线程从waiters中移除,这个函数就是起这个作用。
fixup_owner
从注释上看,是为了处理lock steal。而lock steal似乎多发生在futex requeue操作上,目前尚未仔细研究。
futex_unlock_pi
futex_unlock_pi释放futex以及更新相应的pi_state和rt_mutex的owner字段。函数调用层次比较深,基本上都是每一层做一些基本的更新工作,最终调用到__rt_mutex_futex_unlock来重新调整本线程的优先级,并将top waiter放到wake queue上。在rt_mutex_postunlock调用的rt_mutex_postunlock将新线程唤醒。
如果没有waiter,则使用cmpxchg_futex_value_locked来将用户态地址uaddr上的值设为0。因为锁没有waiter了,所以优先级也不需要恢复了,或者已经恢复过了。
如果有waiter,就使用下面几个函数来切换lock owner,并恢复优先级继承的优先级。
wake_futex_pi
这个函数做了下面几件事:
- 用cmpxchg_futex_value_locked将用户态传入的uaddr处的数值更新为新的
rt_mutex_next_owner() | FUTEX_WAITERS list_del_init(&pi_state->list):将list从原先的表上删除,并重新初始化,准备移到其他的表上。list_add(&pi_state->list, &new_owner->pi_state_list)pi_state->owner = new_owner__rt_mutex_futex_unlockrt_mutex_postunlock
mark_wakeup_next_waiter
注意:此时pi_state->owner已经设置过了,但是pi_state->pi_mutex->owner还没有设置。这个函数主要做了下面几件事情:
rt_mutex_dequeue_pi(current, waiter);rt_mutex_adjust_prio(current):在这里调整了当前线程的优先级,完成了整个优先级继承协议。wake_q_add(wake_q, waiter->task)
put_pi_state
这个函数更多的是清理工作:
- 调用了
rt_mutex_proxy_unlock来释放pi_state->pi_mutex. - 释放了current->pi_state_cache空间
cmpxchg_futex_value_locked原子操作
static int cmpxchg_futex_value_locked(u32 *uval, u32 __user *uaddr, › › › › u32 oldval, u32 newval) { ATOMIC(); int val = *uaddr; if (val == oldval) { *uaddr = newval; } *uval = val; END_ATOMIC(); return 0; } 其中ATOMIC操作通过page_disable()和preempt_disable()保证。
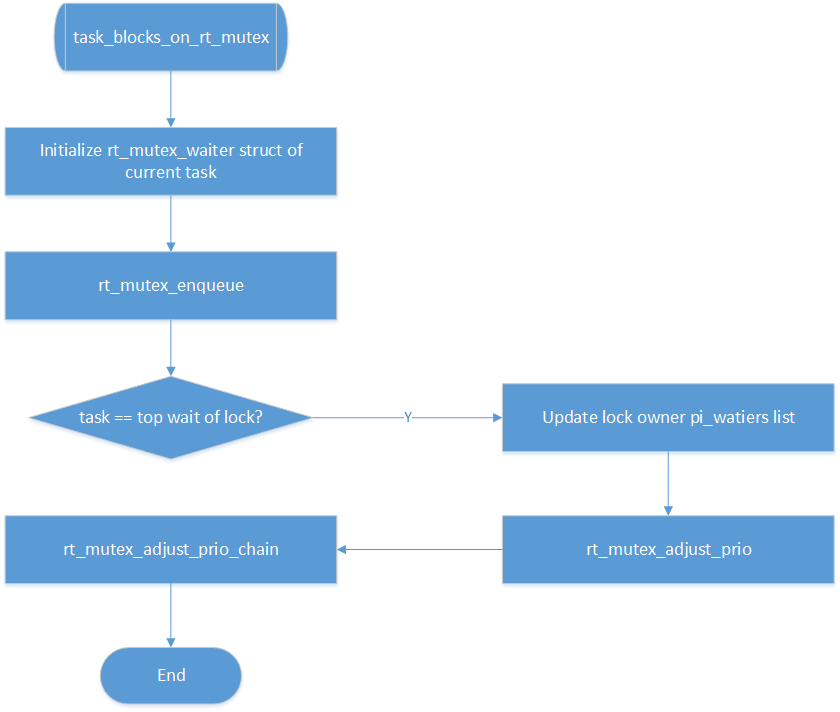
__rt_mutex_start_proxy_lock
从上面futex_lock_pi用到的rt_mutex接口介绍中可知,这个函数是整个PI处理的核心,这个函数又主要调用task_blocks_on_rt_mutex来处理PI。
rt_mutex_adjust_prio(owner)
这个函数就是调整阻塞线程的优先级,从而实现优先级继承的。实现方式也很简单:
if (task_has_pi_waiters(p))
› pi_task = task_top_pi_waiter(p)->task;
rt_mutex_setprio(p, pi_task);
把owner线程设置为owner线程所有waiter(可能来自多个锁)的最高优先级。
rt_mutex_adjust_prio_chain
为什么有这个链式调整?
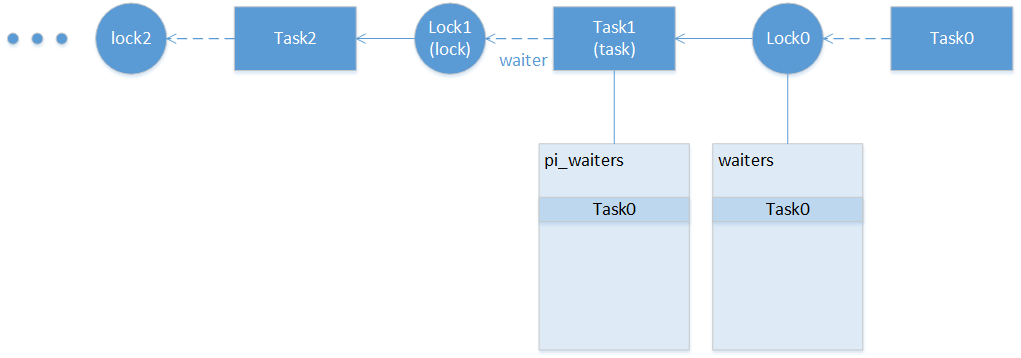
这里有两张表格:
-
每个rt_mutex有张waiters表格,表示所有等待的线程
-
每个task也有张表格,表格里的每一项对应owner线程占有的锁,每一项是一个rt_mutex_waiter,表示申请该锁的最高优先级waiter
假设Task1就是owner,Task0对Lock0的申请导致Task1提升优先级,如果Task1同时被Task2持有的某个锁阻塞,则Task1优先级的改变,有可能会导致Task2 pi_waiters列表改变,同时可能导致Task2优先级改变。依此类推,就会导致上面的这种链式反应。
链处理流程
整个chain的处理流程大致如下:
- 如果Task0是Lock0的top waiter,则激发该链式调整。
- 因为Task0成为Lock0的topwaiter,则Task1的pi_waiters需要调整,则Task1的优先级可能需要调整。退出可能:
-
起点锁释放了
-
链的当前环节被更改( next_lock ≠waiter->lock)
-
Task1没有占锁
-
- 如果Task1也wait在某个lock的时候,则该lock的waiters需要调整,这里有若干种退出可能。
- Task1没有被block
- Task1 pi_waiters中有优先级高于Task0的waiter,换句话说,lock0的top_waiter不是Task1的top pi_waiter,优先级继承不需要继续传递
- 如果Task1在申请Lock1 的时候的优先级(这个记录在waiter->prio里)与当前调整后的优先级相等,则后续没必要在继续调整优先级
- 检测到DEADLOCK
- 回到1继续执行,直到退出链式处理
死锁
有3种情况,函数会返回死锁
- 链上超过1024个锁节点
- 链上任意Task节点申请第一个锁节点,即Lock0
- 链上任意一个锁owner是第一个Task节点,即Task0
参考文献
[1] [Mutex mutandis: understanding mutex types and attributes]. (http://2net.co.uk/tutorial/mutex_mutandis)
[2] POSIX Revision of IEEE Std 1003.1-2008
[3] Source code analysis of pthread_mutex_lock
[4] linux pi_futex浅析
[5] Linux 4.20-rc3 source code
[6] glibc 2.28 source code